Environment
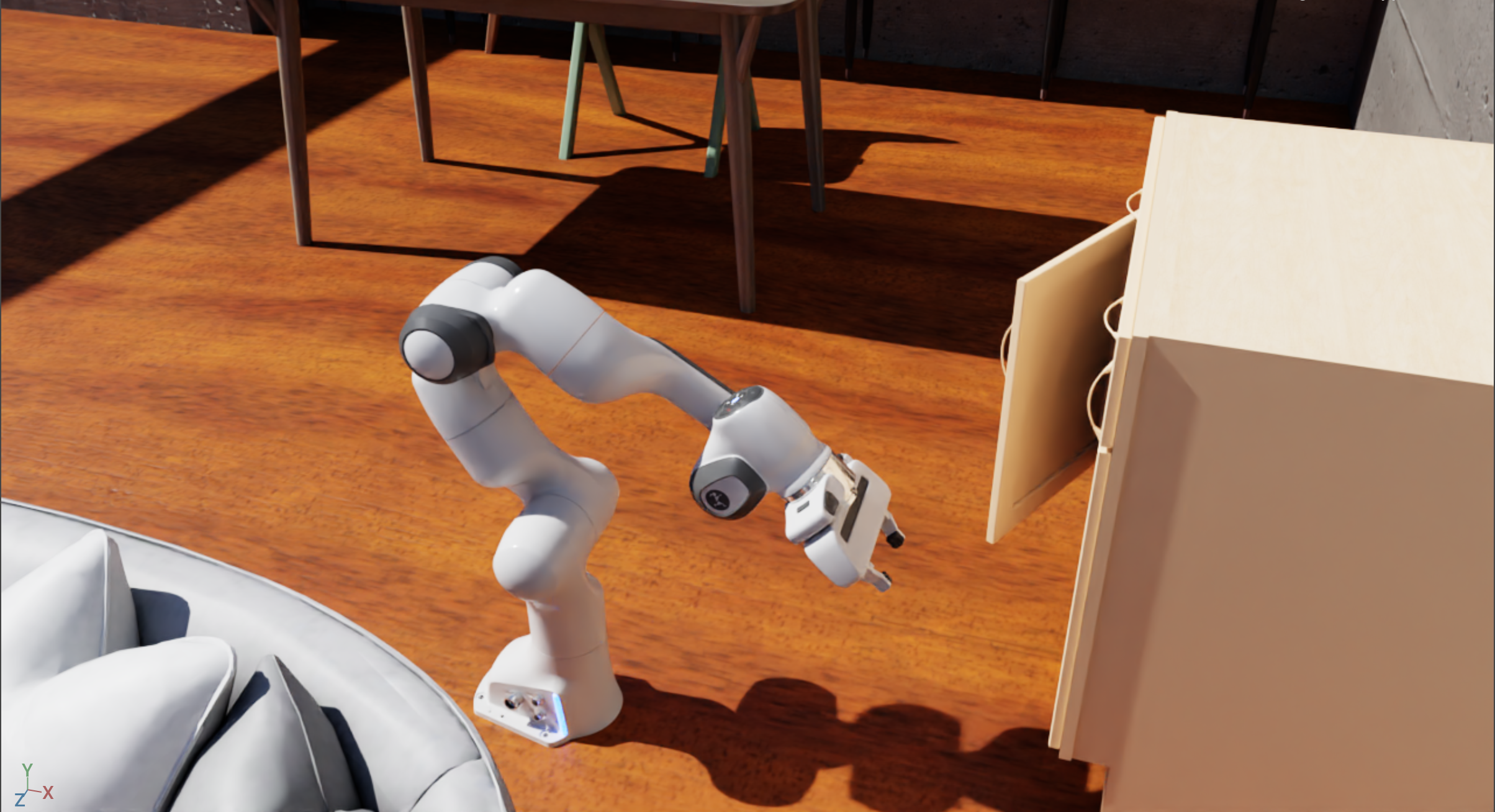
ARNOLD is built on NVIDIA Isaac Sim, a robotic simulation application that provides photo-realistic and physically-accurate simulations for robotics research and development. In ARNOLD, the photo-realistic rendering is powered by GPU-enabled ray tracing, and the physics simulation is based on PhysX 5.0. The figure below gives an illustration of the simulation and rendering.
ARNOLD contains 20 diverse scenes and 40 distinct objects. Their compositions amount to abundant environments. In environment/parameters.py we define some basic classes for scene construction and physics simulation, e.g., SceneParameters and ObjectPhysicsProperties. They make the scene components disentangled and can be modified friendly.
Scenes
Loading
ARNOLD scenes originate from 3D-Front dataset. We formulate a pipeline to parse the 3D-Front scenes to USD format (preferred in Omniverse). Make sure you have prepared the assets (see Setup). Besides, you can refer to USDify if you are interested in the pipeline of converting the scene format.
Loading scenes mainly encompasses the add_reference_to_stage function:
def add_reference_to_stage(usd_path: str, prim_path: str, prim_type: str = "Xform") -> Usd.Prim:
Collision
We set collisions and other attributes for different objects inside the scene:
def setStaticCollider(prim, approximationShape="none", custom_execute_fn=None):
setColliderSubtree(prim, approximationShape, custom_execute_fn)
# set collisions for a room
setStaticCollider(furniture_prim, approximationShape=CONVEXHULL)
setStaticCollider(room_struct_prim, approximationShape="none")
furniture_prim holds all the furniture and room_struct_prim defines all the walls. Currently, the wall geometry is very complicated. And the default collision mechanism might cause issues (huge amount of VRAM etc.). Thus, we use the convex hull for furniture and default collision for the walls.
You can disable the wall collision. Or you can decompose the walls into simple geometries like a collection of blocks. For example, you can refer to collision processing.
Texture
After setting collisions, we set the scene materials. Make sure you have prepared the materials. Or you can use custom mtl files. We use the following command to create a material in Isaac Sim:
omni.kit.commands.execute(
"CreateMdlMaterialPrim",
mtl_url=floor_material_url,
mtl_name=floor_mtl_name,
mtl_path=floor_material_prim_path,
select_new_prim=False,
)
Then we can bind the materials to prims through:
omni.kit.commands.execute(
"BindMaterial",
prim_path=floor_prim.GetPath(),
material_path=floor_material_prim_path,
strength=UsdShade.Tokens.strongerThanDescendants
)
Here we leverage some functions from low-level API which is not documented very well. For more information, you can refer to USD documentation. Even though it is a CPP documentation, you can find equivalent python functions.
Objects
Loading objects is similar to loading scenes. In particular, when we load drawers and cabinets, we re-process the handle for better collision. For fluid simulation, you can enable or disable isosurface for realistic simulation. Detailed settings about the objects are introduced in Physics.
Robot
We use a 7-DoF Franka Emika Panda manipulator with a parallel gripper in ARNOLD for task execution. The agent has direct control over its seven joints and its gripper. We represent end-effector actions with three spatial coordinates for translation and quaternion for rotation. We utilize the built-in motion planner of Isaac Sim to transform the end-effector action back to the space of robot joints for execution. Currently, our tasks do not involve navigation, i.e., the robot base remains fixed during task execution.
Observation
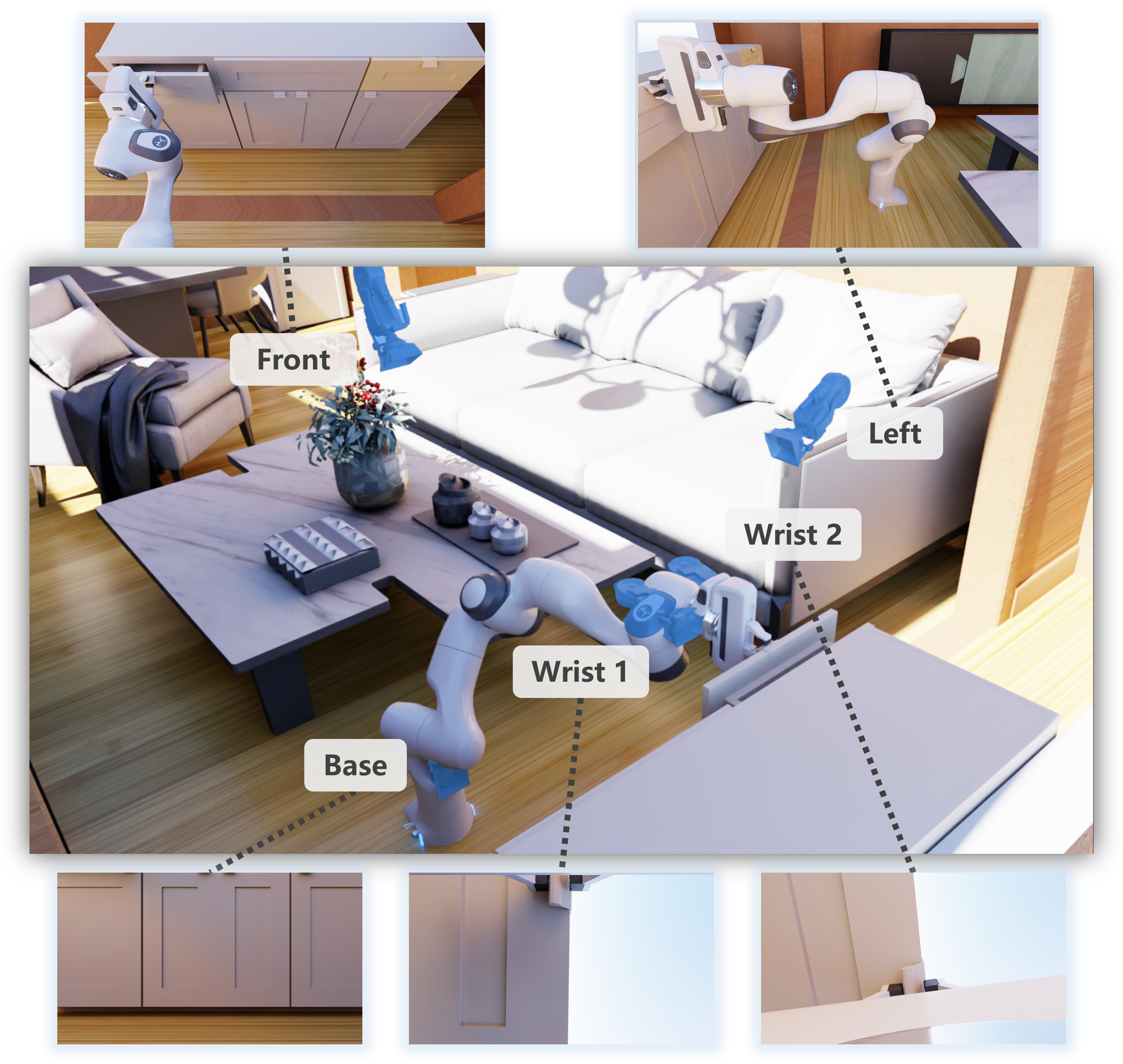
ARNOLD provides five cameras around the robot for visual input. Their placements are shown in the illustrative rendering example at the top of this page. Each camera renders RGB-D image at a resolution of 128×128 by default. Notably, the rendering in ARNOLD is stochastic due to the ray tracing sampling process. In addition to the visual observation, other auxiliary observations can be accessed, e.g., camera parameters, robot base pose, and part-level semantic mask. See how to access them in Data.
Rendering
There are two types of rendering modes in Isaac Sim: ray tracing and path tracing. Ray tracing can work in real-time. Path tracing is quite slow but renders at a much higher quality. To switch rendering mode, check the get_simulation() function in environment/runner_utils.py. Check Omniverse RTX Renderer Overview for more details on rendering. Two rendering modes are visualized as below, left is ray tracing and right is path tracing.

Physics
To ensure physically-realistic simulation, we assign physics parameters to objects, including weight and friction for rigid-body objects, and cohesion, surface tension, and viscosity for fluids. Fluids are simulated using the GPU-accelerated position-based-dynamics (PBD) method. And we provide an optional surface construction process using marching cubes for higher rendering quality. This may cause slower rendering and is controlled by a bool argument iso_surface.
In environment/physics_utils.py we define some helper functions to set up physics properties. For example, as grasping is done through friction in Issac Sim, we need to apply a physical material for all graspable parts. You can refer to the set_physics_material function.
def set_physics_material(stage, prim: Usd.Prim, object_physics_properties: ObjectPhysicsProperties):
"""
Set up physic material for prim at Path
"""
Articulation simulation depends on joint properties. To set joint properties for prismatic joint or revolute joint, you can refer to the set_joint_properties function in environment/physics_utils.py.
def set_joint_properties(stage, prim, damping_cofficient):
If you want to add new properties, you can refer to USD documentation and make educated guesses about what functions to use.
The fluid simulation involves two files environment/fluid_constants.py and environment/fluid_utils.py, where fluid parameters and construction process are defined. In addition, the isosurface mode can be enabled for more realistic fluid simulation by setting iso_surface to True in configs/default.yaml.